Welcome to the PRISM data sets server
This site contains data sets recorded by the CSIR's Optronic Sensor Systems group for image processing research. The data is made available under the PRISM part of the Armscor LEDGER project.
Previews (reduced frame rate and dimensions as well as highly compressed) of the currently available videos are available here.
Uncompressed videos with metadata can be found in the data folder. To obtain a username and password for access, please send an email to zhattingh at the csir co za part of the web site address.
The fiducial marker calibration and verification datasets can be found here.
Tracking Research
The following videos are mainly aimed at tracking research, but can also be used for detection or image stabilisation research. The data was recorded using a Prosilica GC1380 camera with a Nikon AF-S Nikkor 300mm f/4D IF-ED lens mounted on a pan-tilt unit.
Detection and Tracking Research (Stationary Camera)
The following videos can be used to develop vision algorithms for background modeling, segmentation and target detection and tracking. The file names generally reflect a particular type of event in the video. The videos have been compressed using the FFmpeg lossless codec.
Detection and Tracking Research: Synthetic Targets
The following videos can be used to develop small target detection and tracking algorithms. The first video contains a small boat and a frigate crossing. Two small synthetic targets have been injected into each of the other videos.
Detection and Tracking Research
The following videos are stitched together using images from 3 Prosilica cameras to form a 180 degree view. The challenge is to detect and track the vessels in the video.
Scintillation Mitigation Research
The following videos are aimed at scintillation mitigation research. The data was recorded using a camera built by CSIR Optronic Sensor Systems. The camera contains a Prosilica GE1900 sensor and was stationary during recording.
The following videos were recorded over a one day period with the CSIR Optronic Sensor Systems Cyclone long range surveillance camera. All camera parameters were fixed for the duration of the day, except for allowing automatic exposure changes. The range to the advertisement board is approximately 7km.
Passive Ranging: Depth from Defocus
The following images are aimed at passive ranging research. Both the input and the output files used in the paper *insert link* are available here. Please contact us for other window sizes or more information.
| Laboratory Experiment Results |
|---|
| Thumbnail | Description |
|---|
 |
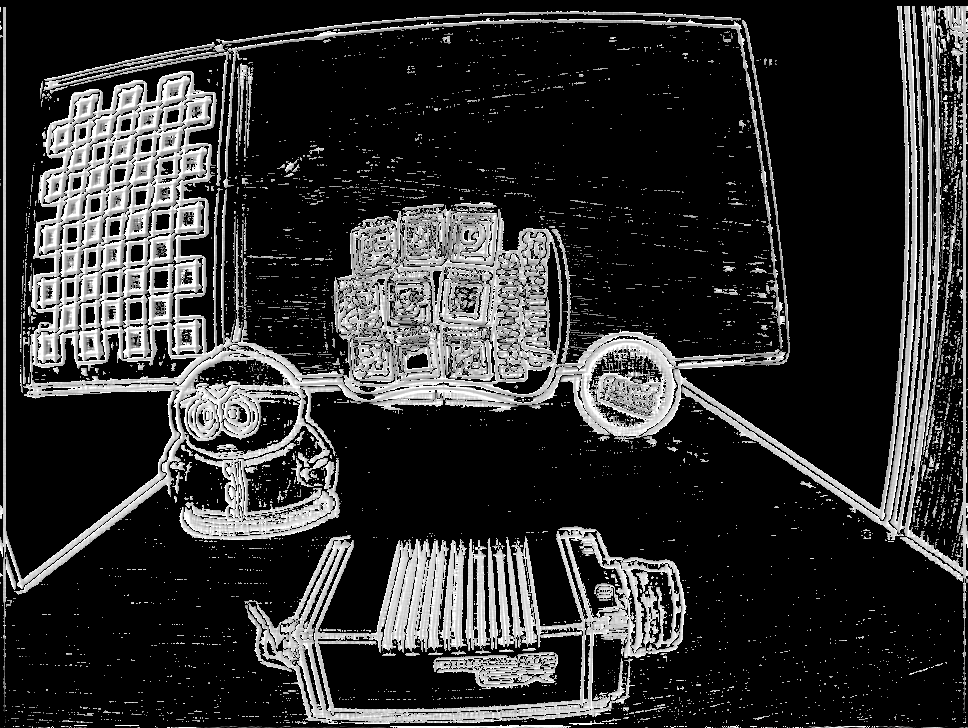
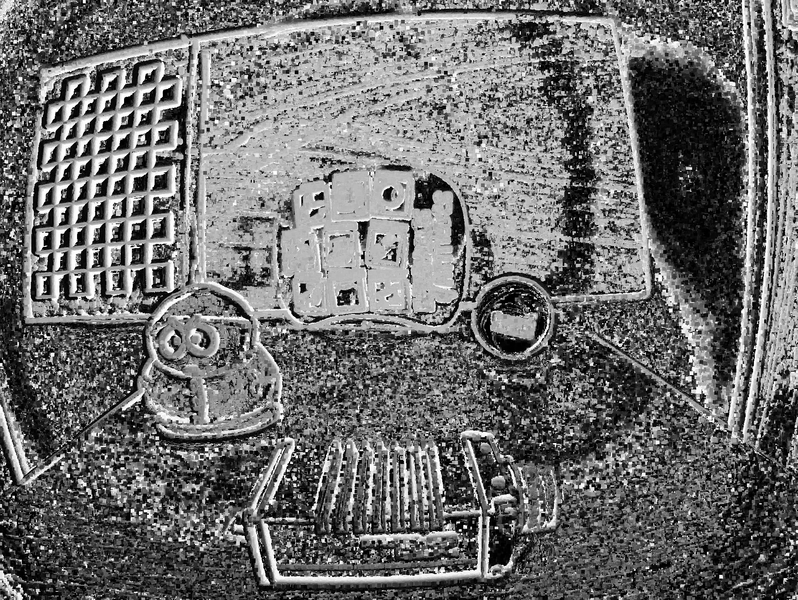
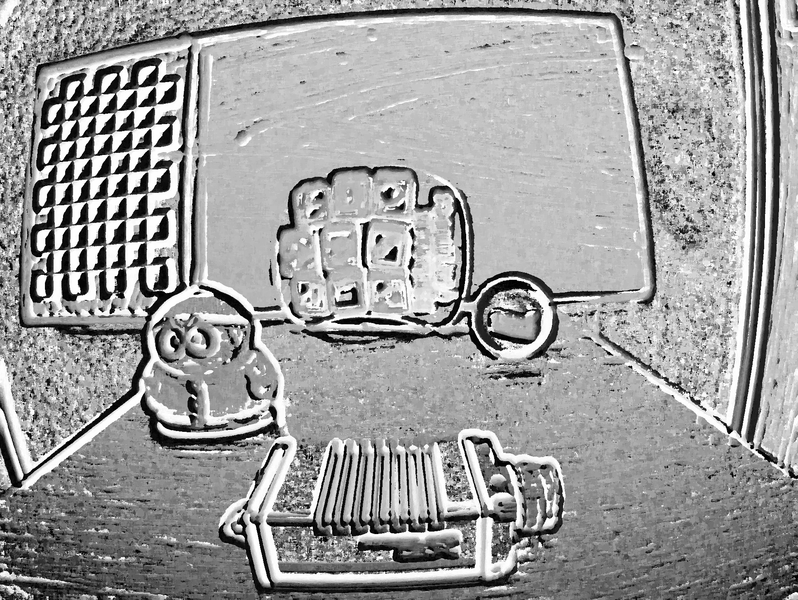
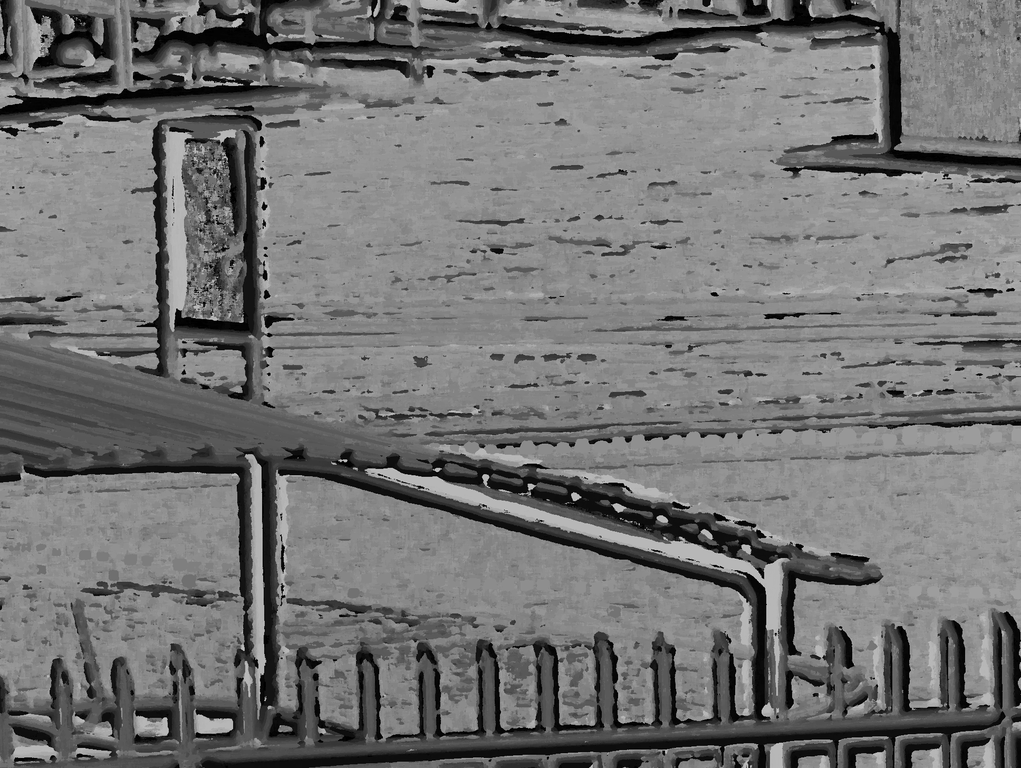
DFD Input Image. Large aperture (F1.8) blurry lab scene. Captured using an Allied vision GT1920 camera with Schneider Cinegon 4.8mm lens. |
 |
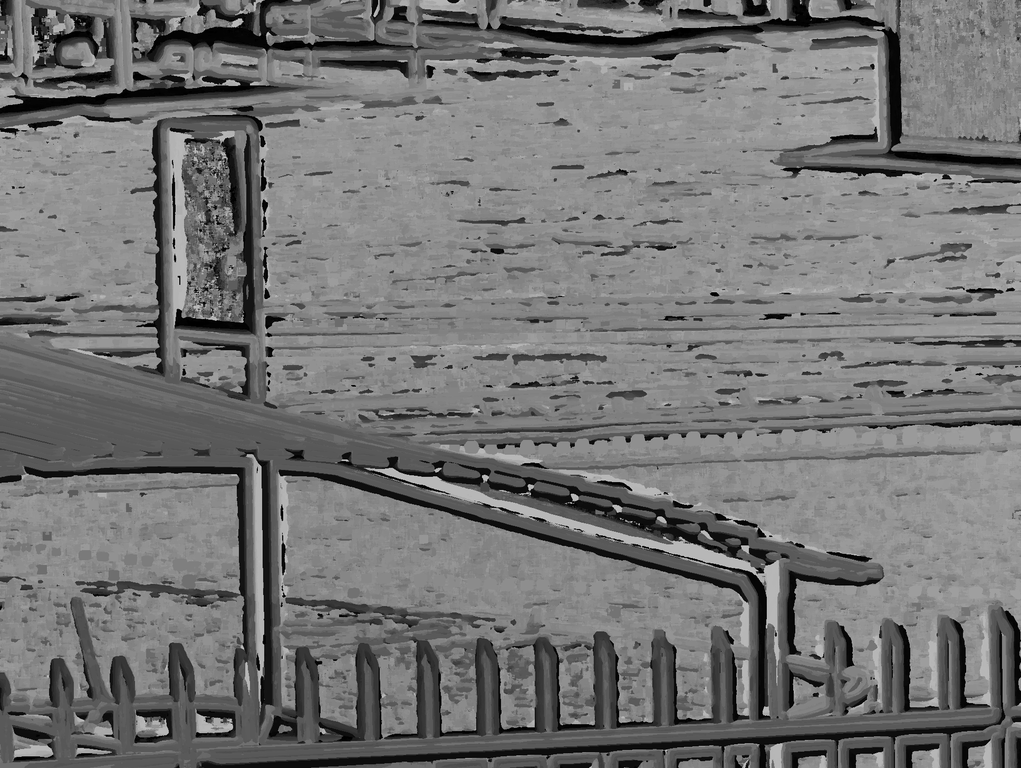
DFD Input Image. Small aperture (F16.0) sharp lab scene. Captured using an Allied vision GT1920 camera with Schneider Cinegon 4.8mm lens. |
 |
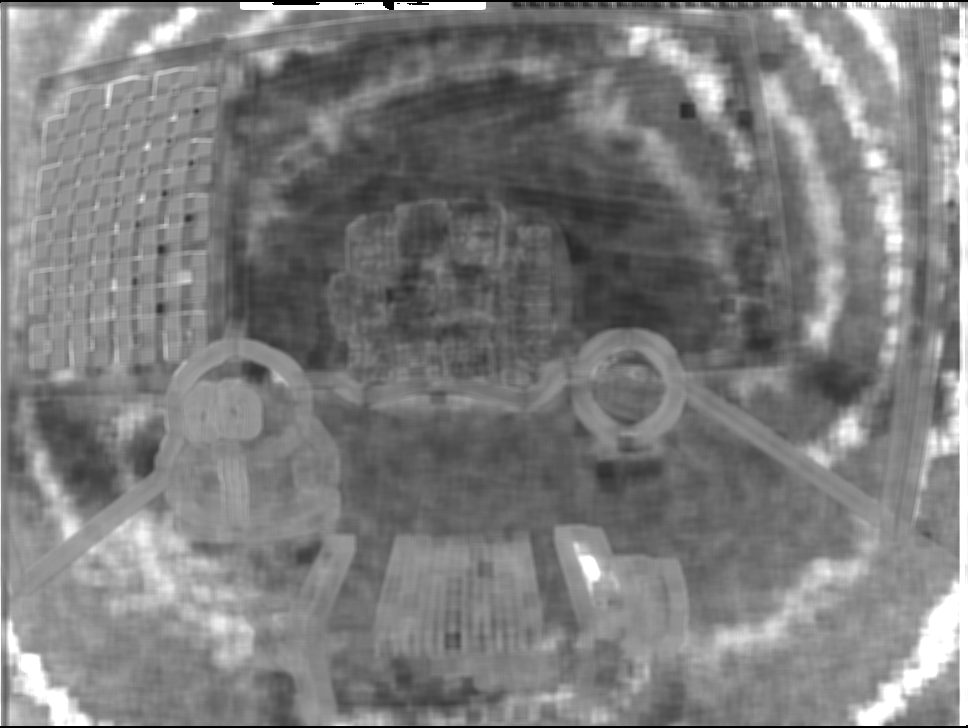
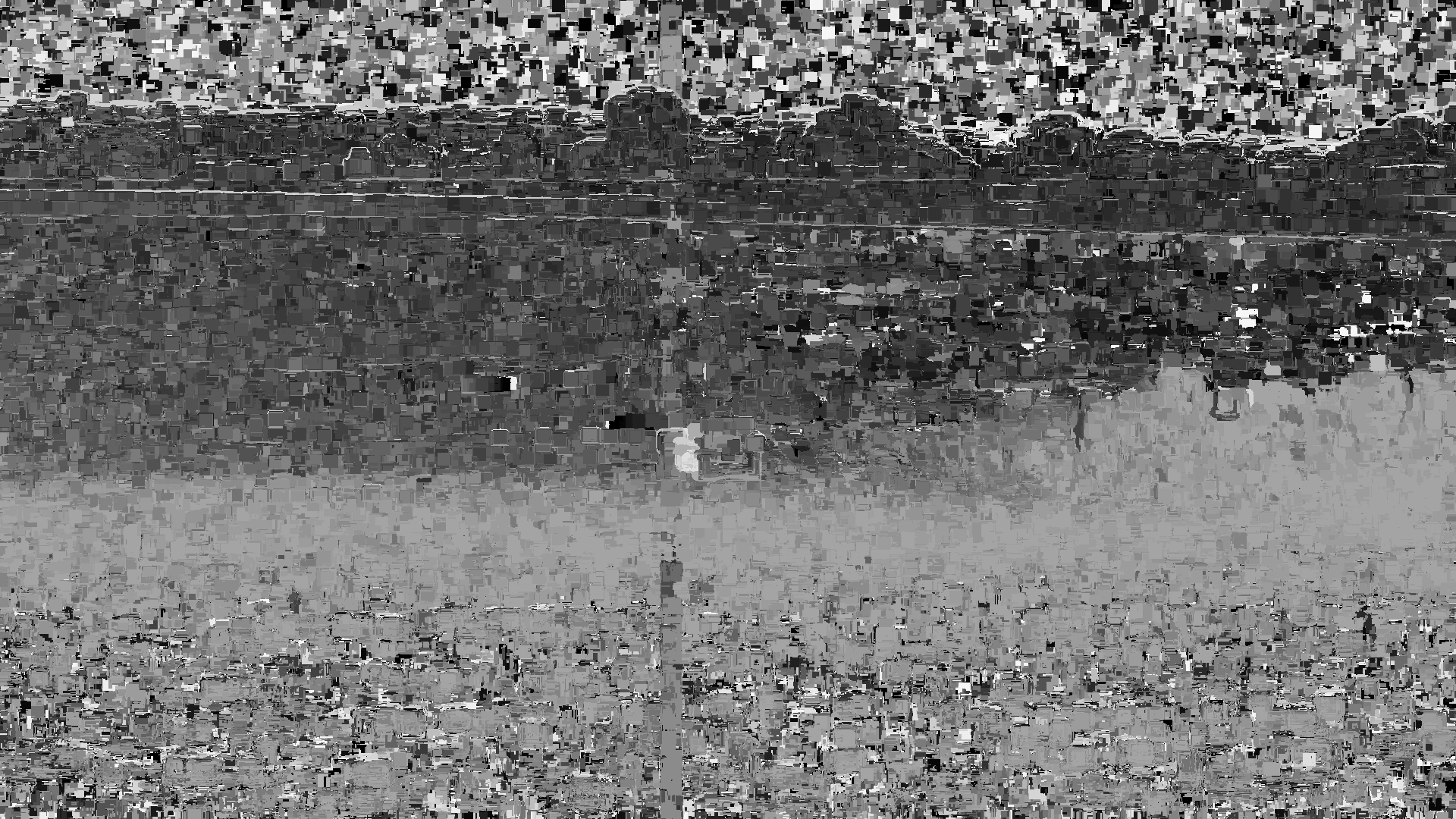
DFD Output Image. Pentland Spatial Domain Algorithm output with window size of 8 pixels. |
 |
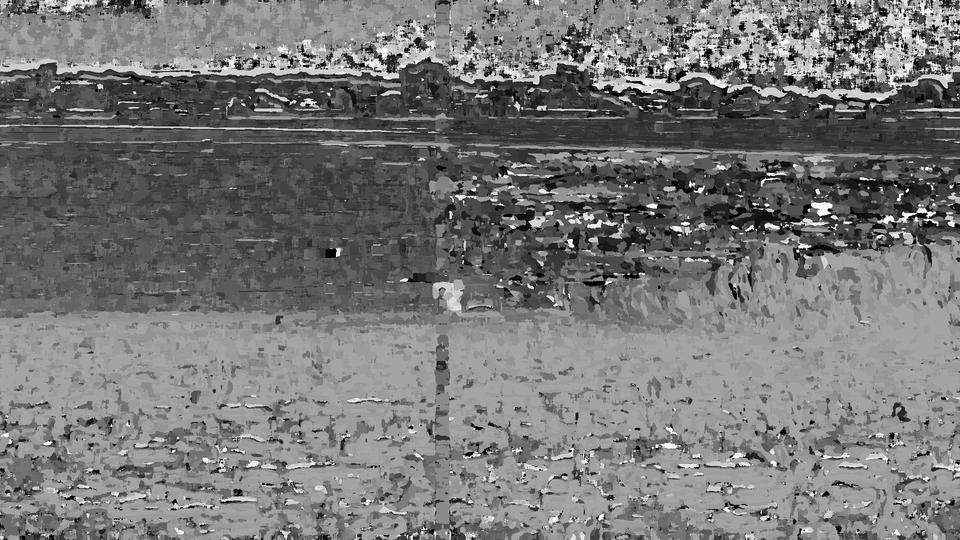
DFD Output Image. Pentland Frequency Domain Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Bove's Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Watanabe-Nayar Algorithm output with window size of 8 pixels. |
| Mid Range Experiment Results |
|---|
| Thumbnail | Description |
|---|
 |
DFD Input Image. Large aperture (F1.8) blurry lab scene. Captured using custom 185mm F2.0 optics with Alled vision GE1900 camera. |
 |
DFD Input Image. Small aperture (F16.0) sharp lab scene. Captured using custom 185mm F2.0 optics with Alled vision GE1900 camera. |
 |
DFD Output Image. Pentland Spatial Domain Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Pentland Frequency Domain Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Bove's Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Watanabe-Nayar Algorithm output with window size of 16 pixels. |
| Long Range (550Meter) Experiment Results |
|---|
| Thumbnail | Description |
|---|
 |
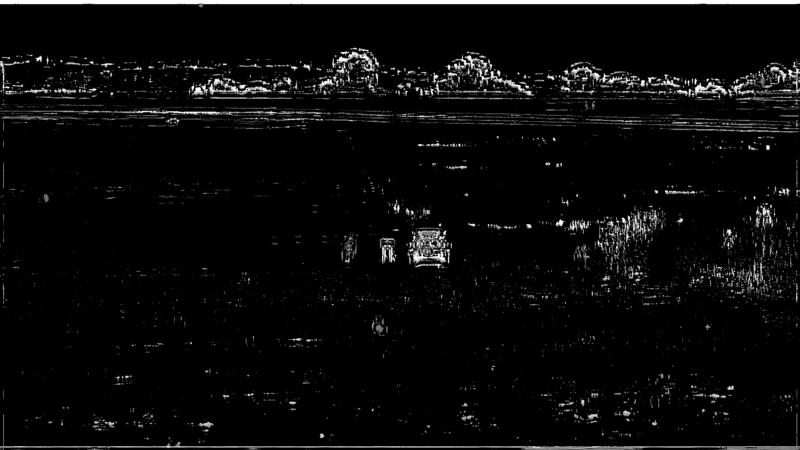
DFD Input Image. Large aperture (F1.8) blurry lab scene. Captured using custom 185mm F2.0 optics with Alled vision GE1900 camera. |
 |
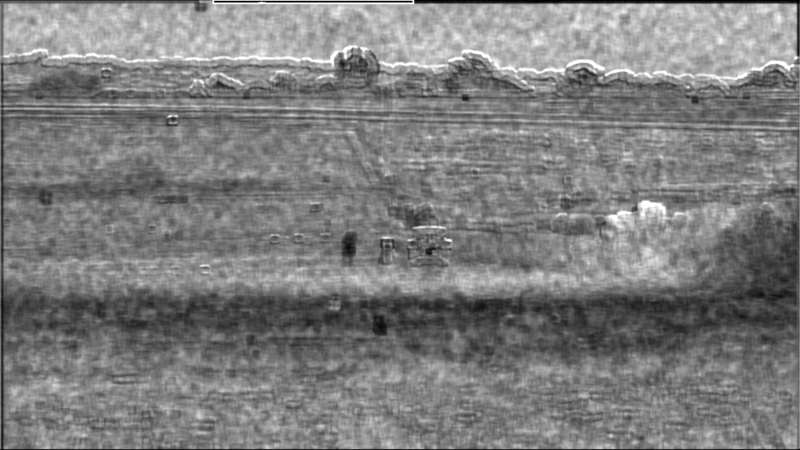
DFD Input Image. Small aperture (F16.0) sharp lab scene. Captured using custom 185mm F2.0 optics with Alled vision GE1900 camera. |
 |
DFD Output Image. Pentland Spatial Domain Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Pentland Frequency Domain Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Bove's Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Watanabe-Nayar Algorithm output with window size of 16 pixels. |
| Long Range (1150Meter) Experiment Results |
|---|
| Thumbnail | Description |
|---|
 |
DFD Input Image. Large aperture (F1.8) blurry lab scene. Captured using custom 185mm F2.0 optics with Alled vision GE1900 camera. |
 |
DFD Input Image. Small aperture (F16.0) sharp lab scene. Captured using custom 185mm F2.0 optics with Alled vision GE1900 camera. |
 |
DFD Output Image. Pentland Spatial Domain Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Pentland Frequency Domain Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Bove's Algorithm output with window size of 16 pixels. |
 |
DFD Output Image. Watanabe-Nayar Algorithm output with window size of 16 pixels. |
Passive Ranging: Depth from Focus
The following images are aimed at passive ranging research. Only the output files used in the paper *insert link* are available here. Please contact us for other window sizes, the input videos or more information.
| Laboratory Experiment Results |
|---|
| Thumbnail | Description |
|---|
 |
Representative DFF Input Image. Large aperture (F1.8) close focused lab scene. Captured using an Allied vision GT1920 camera with Schneider Cinegon 4.8mm lens. |
 |
Representative DFF Input Image. Large aperture (F1.8) far focused lab scene. Captured using an Allied vision GT1920 camera with Schneider Cinegon 4.8mm lens. |
 |
DFF Output Image. Contrast Metric, Window Size 4 |
 |
DFF Output Image. Entropy Metric, Window Size 8. |
 |
DFF Output Image. Standard Deviation Metric, Window Size 64. |
| Mid Range Experiment Results |
|---|
| Thumbnail | Description |
|---|
 |
Representative DFF Input Image. Large aperture (F1.8) close focused lab scene. Captured using an Allied vision GT1920 camera with a Fujinon 75mm lens. |
 |
Representative DFF Input Image. Large aperture (F1.8) far focused lab scene. Captured using an Allied vision GT1920 camera with a Fujinon 75mm lens. |
 |
DFF Output Image. Contrast Metric, Window Size 8 |
 |
DFF Output Image. Entropy Metric, Window Size 8. |
 |
DFF Output Image. Standard Deviation Metric, Window Size 8. |
| Long Range (650m) Experiment Results |
|---|
| Thumbnail | Description |
|---|
 |
DFF Output Image. Contrast Metric, Window Size 8 |
 |
DFF Output Image. Entropy Metric, Window Size 8. |
 |
DFF Output Image. Standard Deviation Metric, Window Size 8. |
| Long Range (1050m) Experiment Results |
|---|
| Thumbnail | Description |
|---|
 |
DFF Output Image. Contrast Metric, Window Size 8 |
 |
DFF Output Image. Entropy Metric, Window Size 8. |
 |
DFF Output Image. Standard Deviation Metric, Window Size 8. |
Passive Ranging: Frequency Domain Depth from Defocus v.s. Atmospheric Scintillation
The following images are aimed at passive ranging research. Only the output files used in the paper *insert link* are available here. Please contact us for other window sizes, the input videos or more information.
| Pentland Frequency Results |
|---|
| Thumbnail | Description |
|---|
 |
DFD Output Image at 1150m in low scintillation conditions. Window Size 8 |
 |
DFD Output Image at 1150m in medium scintillation conditions. Window Size 8 |
 |
DFD Output Image at 1150m in high scintillation conditions. Window Size 8 |
| Bove Results |
|---|
| Thumbnail | Description |
|---|
 |
DFD Output Image at 1150m in low scintillation conditions. Window Size 8 |
 |
DFD Output Image at 1150m in medium scintillation conditions. Window Size 8 |
 |
DFD Output Image at 1150m in high scintillation conditions. Window Size 8 |